Jaël Champagne Gareau
Jaël Champagne Gareau
Accueil
Enseignement
Projets
Publications
Contact
Clair
Sombre
Automatique
Français
Français
English
Branch and Bound
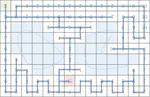
Planification de chemins couvrants
Ce projet visait à développer des planificateurs optimaux de chemins-couvrants. Dans le futur, il est également prévu de développer un planificateur considérant des contraintes énergétiques, de l’incertitude, ainsi que fonctionnant dans des environnements dynamiques.
Code
Fast and optimal branch-and-bound planner for the grid-based coverage path planning problem based on an admissible heuristic function
This paper introduces an optimal algorithm for solving the discrete grid-based coverage path planning (CPP) problem. This problem …
Jaël Champagne Gareau
,
Éric Beaudry
,
Vladimir Makarenkov
PDF
Citation
Projet
DOI
Fast and Optimal Planner for the Discrete Grid-Based Coverage Path-Planning Problem
This paper introduces a new algorithm for solving the discrete grid-based coverage path-planning (CPP) problem. This problem consists …
Jaël Champagne Gareau
,
Éric Beaudry
,
Vladimir Makarenkov
PDF
Citation
Projet
Diapositives
DOI
Citation
×