Jaël Champagne Gareau
Jaël Champagne Gareau
Home
Teaching
Projects
Publications
Contact
Light
Dark
Automatic
English
English
Français
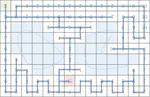
Branch and Bound
Coverage Path-Planning
This project aimed at developping optimal coverage path-planning algorithms. As futur work, we also plan on developping a CPP planner that considers energetic constraints, uncertainties, as well as dynamic environments.
Code
Fast and optimal branch-and-bound planner for the grid-based coverage path planning problem based on an admissible heuristic function
This paper introduces an optimal algorithm for solving the discrete grid-based coverage path planning (CPP) problem. This problem …
Jaël Champagne Gareau
,
Éric Beaudry
,
Vladimir Makarenkov
PDF
Cite
Project
DOI
Fast and Optimal Planner for the Discrete Grid-Based Coverage Path-Planning Problem
This paper introduces a new algorithm for solving the discrete grid-based coverage path-planning (CPP) problem. This problem consists …
Jaël Champagne Gareau
,
Éric Beaudry
,
Vladimir Makarenkov
PDF
Cite
Project
Slides
DOI
Cite
×