Electric Vehicles Planning
 EVs charging at a public station in Montréal
EVs charging at a public station in MontréalElectric vehicles (EVs) are an attractive alternative to fossil-fuel vehicles to reduce greenhouse gas emissions. However, their limited range and their high charging time represent a major obstacle to their massive adoption. Moreover, long journeys require careful planning to determine the charging stations to be used in order to avoid running out of energy. For example, today (year 2019), affordable EVs have an average range of around 250 km. This limited range implies the need to make recharging stops many times on long journeys.
EV journey planning (EVJP) is a complex problem which cannot be effectively solved by conventional approaches. Indeed, EV planners need to take into account not only various driving factors applicable to conventional vehicles (the wind, the energy needed to fight the air resistance relative to the speed, the traffic, eventual detours, etc.), but also factors specific to EVs, such as the level of charging stations (which influences the charging speed), the non-linearity of the charging curve of the battery, the topography of the map (EVs can recover some energy when moving downhill), the probability of the stations’ occupancy as well as the expected waiting time at the charging stations.
While many of these factors have been addressed by previous studies, very few of them have considered the waiting time in the objective function to minimize. This factor is increasingly important because in many countries, the number of EVs on the road increases faster than the number of charging stations. The waiting time will thus probably continue to increase at the majority of the stations for some time.
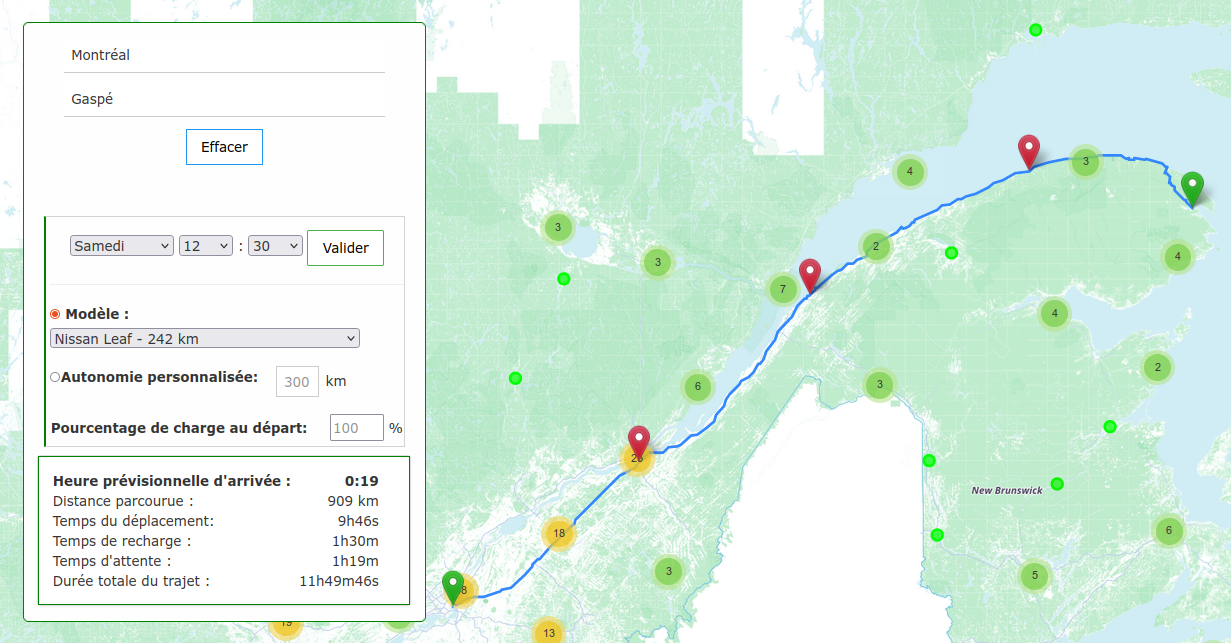
User Interface of veplan.uqam.ca
In this project, we developed a C++ EV planner and a web frontend that considers the travel time, the waiting time and the charging time when computing an EV journey.
Related Publications
